Temporal Difference
1. Introduction
지금까지 MDP 문제를 풀기 위한 방법으로 Dynamic Programming (DP)과 Monte-Carlo Method (MC)에 대해 다루었다. DP는 time-step 마다 가치함수를 업데이트 할 수 있지만, Model-Based 한 환경에만 적용할 수 있다는 한계가 있다. 반면, MC는 Model-Free한 환경에 대해서도 Experience Sampling을 통해 MDP 문제를 풀 수 있지만 Model을 업데이트 하기 위해 Sampling된 Episode가 반드시 종료되어야 한다는 한계가 있다. Temporal-Difference (TD)는 DP와 MC의 장점을 모두 결합하여 Model-Free한 환경에 대해서도 Expereience Sampling을 통해 MDP 문제를 풀 수 있고, Episode가 종료되지 않더라도 Model을 업데이트 할 수 있다는 특징이 있다. TD Control 알고리즘의 기본적인 형태와 원리는 DNN과 결합하여 발전된 강화학습 알고리즘인 DQN, Double DQN 등의 형태와 매우 유사하며, Q-function을 어떻게 도출하는냐에 대한 차이만 존재한다.
2. TD Control Algorithm
MC와 마찬가지로 Model-Free한 환경에 적용하기 위해 가치함수로 Q-function을 사용한다. TD는 bootstrap을 통해 Episode가 종료되지 않더라도 Model을 업데이트 할 수 있고, 본 포스팅에서는 가장 기본적인 형태인 매 time-step마다 Model을 업데이트 하는 TD control Algorithm을 다룬다. Q-function을 업데이트 하는 방법에 따라 on-policy TD Control Algorithm을 SARSA라 부르고, off-policy TD Control Algorithm을 Q-learning이라 부른다.
2-1. On-policy vs Off-policy
Agent가 직접 Action을 수행하는 policy를 Behavior policy라 하고, 가치를 evaluate하고 improve 하기 위한 policy를 Target policy라 한다. 다시 말해, Behavior policy는 MDP 환경과 상호작용하는 정책이며, 해당 환경에서 학습의 대상이 되는 정책을 Target policy라 할 수 있다. 기호로 Behavior Policy와 Target Policy를 다음과 같이 표현한다.
- Behavior Policy: $ b(a|s) $
- Target Policy: $ \pi(a|s) $
Behavior policy와 Target policy가 동일한 경우 ($ b(a|s)=\pi(a|s) $), On-policy control이라 부른다. 반대로 Behavior Policy와 Target Policy가 다른 경우 ($ b(a|s) \neq \pi(a|s) $), Off-policy control이라 부른다. On-policy control의 경우, Q-function을 업데이트 할 때, Agent가 Next State에서 수행하는 Policy (Target Policy)는 현재 Policy (Behavior Policy)를 그대로 따른다. 반면, Off-policy control의 경우, Q-function을 업데이트 할 때, Agent가 Next State에서 수행하는 Policy (Target Policy)는 현재 Policy (Behavior Policy)를 그대로 따르지 않는다. (e.g., Greedy Action) On-policy control의 경우 local optimal에 빠질 가능성이 있는 반면 수렴이 상대적으로 빠르다. 반대로, Off-policy control의 경우 local optimal에 빠지지 않지만 variance가 크기 때문에 수렴이 상대적으로 느리다. 글로 이해가 되지 않는다면 본 포스팅에서 각각의 TD Control Algorithm에 대해 Q-function 업데이트를 위한 수식을 보면 쉽게 이해가 가능할 것이다.
2-2. SARSA: On-Policy TD Control Algorithm
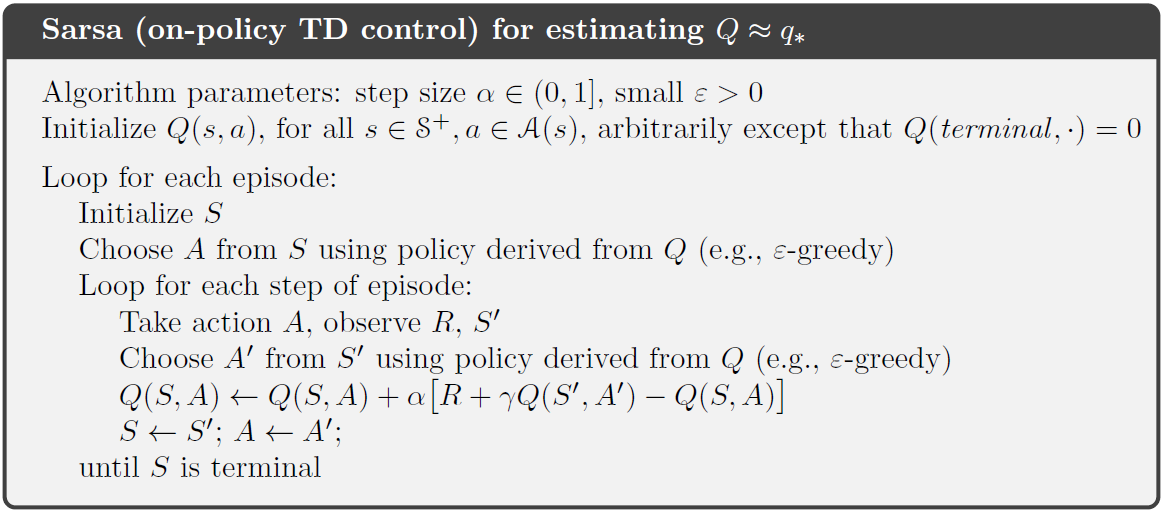
SARSA Algorithm은 매 time step $t$ 마다 State ($S_t$)에서 Behavior Policy를 따르는 Action ($A_t$)을 수행한 이후, 그에 따른 Reward ($R_{t+1}$)를 관찰한다. $S_t$에서 $A_t$를 수행한 이후, 얻어진 Next State ($S_{t+1}$)에서 Behavior Policy를 따르는 Action ($A_{t+1}$)을 관찰한 이후, 다음 수식을 통해 Q-function을 업데이트 한다.
\[Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \left[ R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t) \right]\]SARSA라는 이름이 붙은 이유는 State-Action-Reward-(Next)State-(Next)Action 을 관찰하여 Q-function을 업데이트 하기 때문이다.
- Pseudo Code
SARSA 알고리즘을 Pseudo Code로 나타내면 다음과 같다.
 SARSA Algorithm Pseudo Code
SARSA Algorithm Pseudo Code
2-3. Q-learning: Off-Policy TD Control Algorithm
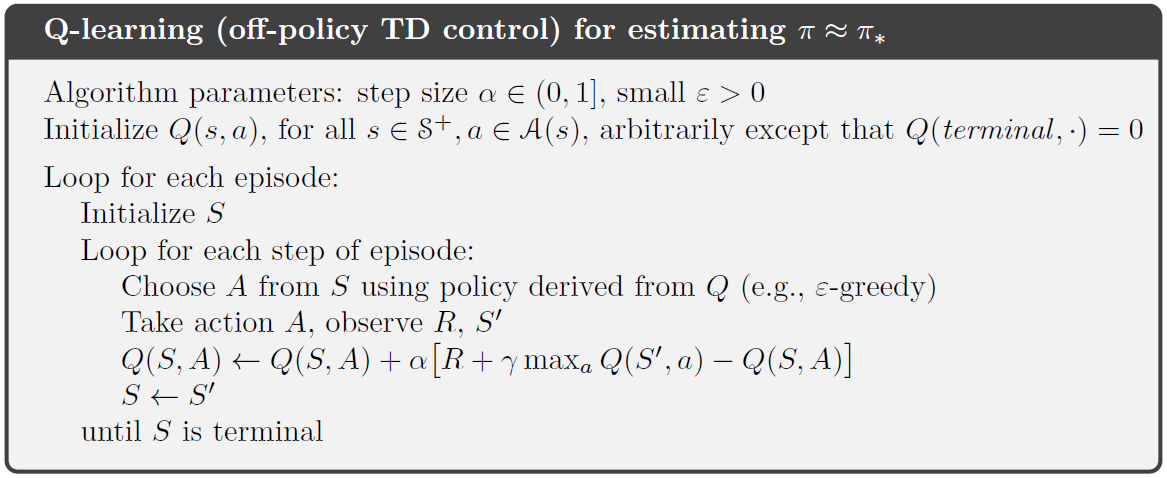
Q-learning Algorithm은 SARSA와 그 형태가 매우 유사하다. SARSA 알고리즘과 마찬가지로 매 time step $t$ 마다 State ($S_t$)에서 Behavior Policy를 따르는 Action ($A_t$)을 수행한 이후, 그에 따른 Reward ($R_{t+1}$)를 관찰한다. 차이점은 $S_t$에서 $A_t$를 수행한 이후, 얻어진 Next State ($S_{t+1}$)에서 Behavior Policy를 따르는 것이 아니라 Target Policy (Greedy Policy)를 따르는 Action을 관찰한 이후, 다음 수식을 통해 Q-function을 업데이트 한다.
\[Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \left[ R_{t+1} + \gamma \max_{a'}Q(S_{t+1}, a') - Q(S_t, A_t) \right]\]위의 수식에서 확인할 수 있듯이, Q-learning과 SARSA는 $S_{t+1}$ 에서 관찰하는 Action 과 관련된 내용을 제외하면 완벽하게 동일한 것을 알 수 있다.
- Pseudo Code
Q-learning 알고리즘을 Pseudo Code로 나타내면 다음과 같다.
 Q-learning Algorithm Pseudo Code
Q-learning Algorithm Pseudo Code
3. Conclusion
TD Contorl은 DP와 MC의 장점을 결합하여 Model Free한 MDP 환경에서 Episode가 종료되지 않더라도 Model을 업데이트 할 수 있다는 특징이 있다. TD Control 알고리즘은 향후 발전된 강화학습의 알고리즘의 형태와 원리가 매우 유사하다. 다음 포스팅에서는 Python 기반으로 Frozen Lake 환경에서 TD Control 알고리즘을 구현하는 예제를 다룬다.